Mandy Xie
Ph.D. student in Computer Science, Georgia Institute of Technology
I am now a third year Ph.D. student in computer science, co-advised by professor Frank Dellaert and professor Harish Ravichandar at Georgia Institute of Technology. Prior to enrolling in computer science, I completed my master's program in Aerospace Engineering at Georgia Tech, and received my bachelor degree in Mechanical Engineering from Huazhong University of Science and Technology, Wuhan, China.
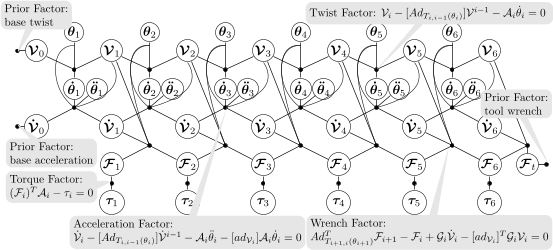
My current research interests cover various topics in robotics, including but not limited to robot motion planning, motion generation, and reactive motion policy learning. I am interested in learning motion policies from demonstrations and leveraging structured motion policy classes such as Riemannian Motion Policy and Geometric Fabrics to improve data efficiency.